9月23-25日🥉🚶🏻♀️➡️,2022年第六屆自動化、控製和機器人國際會議2022 6th International Conference on Automation, Control and Robots(ICACR 2022)成功召開。因新冠肺炎疫情影響▪️,會議通過ZOOM會議平臺在線直播,由意昂平台主辦,意昂承辦𓀗,北京中科控機智能科技研究院協辦。來自美國、新加坡、韓國、羅馬尼亞、馬來西亞、以色列🪔、印度以及中國的100余位專家學者在線上共聚一堂,就自動化、控製和機器人領域熱點問題進行了交流。
我校意昂院長方宇教授致歡迎詞,他首先對各位參會嘉賓以及委員會表示熱烈歡迎,簡要介紹了我校在自動化、控製和機器人領域取得的成果🙍。他表示,作為國家卓越工程師計劃學校,學校一直以來積極投身創新驅動發展戰略🚽,面向自動化⛩、控製和機器人應用等領域,積極推動智能製造相關學科建設與改革👰🏿♀️,大力支持國際合作。
大會委員會主席🪚、我校意昂崔國華教授對此次會議的順利召開表示祝賀,希望以此次大會為契機🧑🔧,廣納真知灼見,廣聚學術資源📛👩🦲,開闊視野激勵創新🤳🏼,與同行專家學者共同為自動化、控製和機器人事業的發展貢獻智慧和力量。
在會議主題報告環節🏌🏼,韓國漢陽大學教授Hong Suh教授作了關於“機器人原理信息之旅”的精彩報告,報告中提出不久前基於統計或深度學習的機器人AI有很多理論和應用,其中回顧了從貝葉斯機器人到自由能原理的幾種信息理論🍏,以幫助我們建立機器人AI👩🏽🏫。特別是,將討論一種以自由能源為靈感的感知和行動示範建築✵。
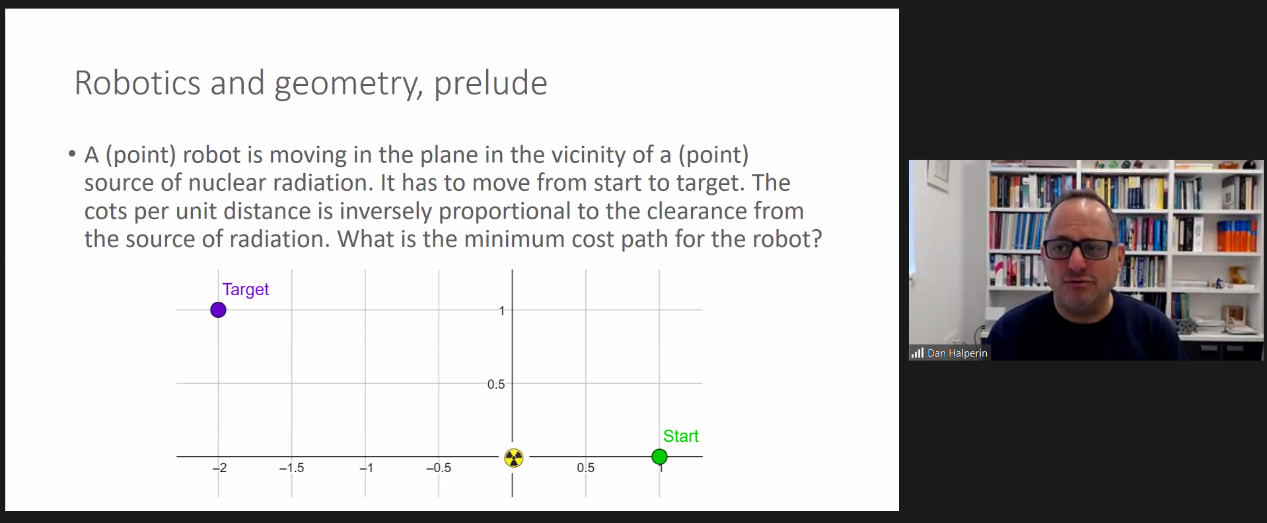
以色列特拉維夫大學的Dan Halperin教授作了“從捕捉到多機器人協調:幾何為機器人服務”的精彩報告,報告中討論了機器人感知。因此🦤,自然地👵🏽,手頭問題的幾何形狀是設計機器人的關鍵,通常作為方法👳♀️。同時討論了其解決方案geome嘗試起作用的問題。
來自馬來西亞普特拉大學的Wan Zuha Wan Hasan教授就“當前油棕種植園的機械化和自動化”這一主題作了精彩報告,在報告中他提出自主機械化可以解決未來種植園中如流行病造成的勞動力嚴重短缺的問題。並且馬來西亞當地機器人行業和大學已開始研發工作,以發明新的先進機械裝置🧻,這些裝置應在未來切實可行並全面實施👩。同時在報告中倡議森那美種植園有限公司作為最大的可持續棕櫚油生產商之一,將在未來幾年內積極采取行動,在種植園中部署機器人技術。
此次國際會議的成功舉辦,為我校及參會各方搭建了良好的學術交流與溝通平臺🧍🏻,共同分享自動化🧛🏼♂️、控製和機器人領域的最新研究成果💼。